- CNET
- NASA
- Sciences&Avenir
- TechnoScience
- The SKY live
- Futura Science
- Deep Space Network
- Trust My Science
- ESA
- Ciel et Espace
- ISRO
- SpaceNews
NASA’s Voyager 1 Resumes Sending Engineering Updates to Earth

SDO | Observatoire de la dynamique solaire

SDO nous aide à comprendre le comment et le pourquoi des changements magnétiques du Soleil. Il déterminera comment le champ magnétique est généré et structuré, ainsi que la manière dont l’énergie magnétique stockée est libérée dans l’héliosphère et le géoespace. Les données et analyses SDO nous aideront également à développer la capacité de prédire les variations solaires qui influencent la vie sur Terre et les systèmes technologiques de l’humanité.
SDO mesure les propriétés du Soleil et l’activité solaire. Il existe peu de types de mesures, mais bon nombre d’entre elles seront prises. Par exemple, la vitesse de surface est mesurée par HMI. Ces données peuvent être utilisées pour de nombreuses études différentes. L’un est le taux de rotation de la surface, qui doit être supprimé pour étudier les autres. Après avoir soustrait la rotation, vous obtenez les vitesses d’oscillation et de convection. Ces derniers ressemblent à des nuages d’orage recouvrant le Soleil. Les gaz chauds se déplacent vers l’extérieur au centre des vagues et vers le bas sur les bords, tout comme l’eau bouillante. En regardant ces vitesses, vous pouvez voir comment les taches solaires affectent la zone de convection. En regardant une longue séquence de données (plus de 30 jours), vous voyez les oscillations du Soleil (comme sur la photo). Ces modèles peuvent être utilisés pour regarder dans et à travers le Soleil.
Objectifs scientifiques de la mission
Les objectifs scientifiques du projet SDO sont d’améliorer notre compréhension de sept questions scientifiques :
- Quels mécanismes animent le cycle quasi-périodique de 11 ans de l’activité solaire ?
- Comment le flux magnétique de la région active est-il synthétisé, concentré et dispersé sur la surface solaire ?
- Comment la reconnexion magnétique à petite échelle réorganise-t-elle la topologie du champ et les systèmes de courant à grande échelle et quelle est son importance pour le réchauffement de la couronne et l’accélération du vent solaire ?
- D’où proviennent les variations observées dans l’irradiance spectrale EUV du Soleil et quel est leur lien avec les cycles d’activité magnétique ?
- Quelles configurations de champ magnétique conduisent aux CME, aux éruptions de filaments et aux éruptions qui produisent des particules énergétiques et des rayonnements ?
- La structure et la dynamique du vent solaire près de la Terre peuvent-elles être déterminées à partir de la configuration du champ magnétique et de la structure atmosphérique près de la surface solaire ?
- Quand l’activité aura-t-elle lieu et est-il possible de faire des prévisions précises et fiables sur la météorologie et le climat spatiaux ?
Satellite
- Vaisseau spatial stabilisé et robuste sur 3 axes.
- Masse au lancement de 3 100 kg (poids de 6 800 lbs) ; Charge utile de 270 kg, 1400 kg de carburant.
- Le vaisseau spatial mesure 2,2 x 2,2 x 4,5 m, les panneaux solaires mesurent 6,5 m de diamètre lorsqu’ils sont déployés.
- Les panneaux solaires couvrent une superficie de 6,6 m², produisant 1 450 W de puissance. La forme de la plaque d’accueil empêche le panneau solaire de bloquer les antennes à gain élevé.
- Les données scientifiques sont envoyées au sol à un débit d’environ 130 Mbps sur un flux de données continu à haut débit à une fréquence en bande Ka d’environ 26 GHz.
Lancement
- SDO sera prêt le 11 février 2010 à 10 h 23 HNE pour un lancement sur un Atlas V depuis le SLC 41 à Cap Canaveral.
- L’observatoire sera placé sur une orbite de transfert géosynchrone (GTO) par l’Atlas V. Le système de propulsion de SDO effectuera ensuite une manœuvre de circularisation pour propulser le vaisseau spatial sur une orbite géosynchrone (GEO).
- Le moteur principal du SDO est un système bi-ergol utilisant du carburant monométhylhydrazine (MMH) et du tétroxyde d’azote (NTO). Les propulseurs utilisant le même mélange de carburant et de comburant maintiendront SDO sur la bonne orbite pendant la mission.
Orbite
- La cadence rapide et la couverture continue requises pour les observations SDO ont conduit à placer le satellite sur une orbite géosynchrone inclinée. Cela permet un contact quasi continu et à haut débit avec une seule station au sol dédiée.
- Des observations presque continues du Soleil peuvent être obtenues à partir d’autres orbites, telles que l’orbite terrestre basse (LEO). Si le SDO était placé dans un LEO, il serait nécessaire de stocker de grands volumes de données scientifiques à bord jusqu’à une opportunité de liaison descendante. Le débit de données élevé de SDO, ainsi que les difficultés liées à la gestion d’un grand système de stockage embarqué, ont entraîné la nécessité d’un contact continu.
- Les inconvénients de cette orbite incluent des coûts de lancement et d’acquisition d’orbite plus élevés (par rapport à LEO) et des saisons d’éclipse (ombre terrestre) deux fois par an. Au cours de ces périodes d’éclipse de 2 à 3 semaines, SDO connaîtra une interruption quotidienne des observations solaires. Il y aura également trois événements d’ombre lunaire chaque année depuis cette orbite.
- Cette orbite est située aux confins de la ceinture de rayonnement terrestre, où la dose de rayonnement peut être assez élevée. Un blindage supplémentaire a été ajouté aux instruments et à l’électronique pour réduire les problèmes causés par l’exposition aux rayonnements. Parce qu’il s’agit d’un effet de météo spatiale, SDO est affecté par les processus mêmes qu’il est conçu pour étudier !
La NASA prépare déjà Artemis IV et V

La NASA vient également de sélectionner de nouveaux instruments qui pourront être utilisés pour des expériences scientifiques dès Artemis III
Afin d’étudier l’environnement lunaire à proximité du Pôle sud de la Lune, la NASA a sélectionné de nouveaux instruments scientifiques.
- Le LEMS (Lunar Environment Monitoring Station) sera une station de surveillance de l’environnement lunaire. Il est constitué de plusieurs sismomètres pour surveiller l’activité sismique de la Lune.
- Le LEAF (Lunar Effects on Agricultural Flora) doit étudier les effets de l’environnement lunaire sur les cultures spatiales. L’objectif est de voir si les plantes cultivées dans cet environnement conservent leurs qualités nutritionnelles.
- Enfin, le LDA (Lunar Dielectric Analyzer) doit mesurer la capacité du régolithe à propager un champ électrique. Un instrument essentiel pour évaluer la quantité de glace à la surface de la Lune et notamment dans ces cratères les plus profonds et les moins exposés au Soleil.
Une nouvelle étoile va apparaitre dans le ciel durant plusieurs jours !

Le radiotélescope de la Villette procède à une surveillance régulière du spectre H1 dans la direction de T CrB.

Le spectre est comparé avec celui de la base de données EU-HOU/LAB afin de déceler tout changement.
Ejection de Masse Coronale (EMC – CME)

Une éjection de masse coronale du Soleil le 24 mars 2024 provoque un orage géomagnétique avec des vents solaire à 800 Km/s.

Une éjection de masse coronale (en abrégé EMC ; en anglais coronal mass ejection, CME) est une bulle de plasma produite dans la couronne d’une étoile (par exemple la couronne solaire).

Le film de l’activité solaire de ces derniers jours

Eclipse solaire du 8 avril 2024

Le dernier alignement de la Lune avec la Terre et le Soleil, également visible depuis le continent américain, s’est produit le 14 octobre 2023. L’éclipse n’avait cependant pas été totale, car la Lune, alors située sur un point de son orbite proche de la Terre, apparaissait légèrement plus petite que le disque solaire dans la voûte céleste, ne le cachant que partiellement. Les observateurs du ciel ont alors pu admirer la formation d’un anneau de feu autour du disque lunaire (on parle ici d’éclipse annulaire), et une baisse de luminosité du Soleil atteignant par endroit jusqu’à 10 % de sa luminosité habituelle, au pic de l’éclipse.
L’éclipse solaire du 8 avril 2024 plongera quant à elle certaines régions dans une nuit totale durant plusieurs minutes : cette fois-ci, la Lune sera légèrement plus éloignée de la Terre, et le disque lunaire pourra ainsi totalement éclipser le disque solaire. On parle alors d’éclipse solaire totale.

Intuitive Machines et la NASA qualifient l’atterrisseur lunaire IM-1 de succès alors que la mission touche à sa fin


Jeff Foust February 28, 2024

WASHINGTON — La NASA et Intuitive Machines ont déclaré que la mission IM-1, dans ses dernières heures, était un « succès sans réserve » malgré un atterrissage brutal qui a laissé le vaisseau spatial de travers.
Lors d’une conférence de presse le 28 février, les responsables de l’agence et de l’entreprise ont déclaré avoir reçu des données de presque toutes les charges utiles de l’atterrisseur Nova-C, nommé Odysseus, qui a atterri six jours plus tôt près du cratère Malapert A, dans les régions polaires sud de la Lune.
« Nous avions des objectifs de mission de très haut niveau consistant à atterrir en douceur sur la surface de la Lune – en douceur et en toute sécurité – et à restituer des données scientifiques à nos clients », a déclaré Steve Altemus, directeur général d’Intuitive Machines. « Ces deux objectifs sont atteints, donc à notre avis, c’est un succès sans réserve. »
La NASA a déclaré avoir reçu des données de ses cinq charges utiles actives sur la mission IM-1, dont certaines ont fonctionné pendant le transit vers la Lune et d’autres ont fourni des données après l’atterrissage. Une sixième charge utile est un rétroréflecteur laser qui sera testé dans les mois à venir.
« Un atterrissage en douceur sur la Lune est un grand accomplissement », a déclaré Joel Kearns, administrateur associé adjoint pour l’exploration à la Direction des missions scientifiques de la NASA. « Cette mission est un éclaireur. Vous pouvez considérer cela comme un test en vol.
Lors d’un autre briefing plus tôt dans la journée, l’administrateur de la NASA, Bill Nelson, a soutenu cette conclusion. « Odysseus est un succès du point de vue de la NASA », a-t-il déclaré.
Cette évaluation découle d’un atterrissage qui n’a pas nécessairement été si doux. La société avait précédemment déclaré que les télémètres laser du vaisseau spatial étaient inutilisables et avait plutôt modifié le logiciel pour utiliser des lasers sur une charge utile de la NASA, le Navigation Doppler Lidar. Lors d’une réunion d’information le 23 février, les responsables de l’entreprise ont déclaré qu’ils pensaient que cet effort était un succès .
Cependant, Tim Crain, directeur de la technologie d’Intuitive Machines, a déclaré que même si les ingénieurs ont réussi à mapper les données de la charge utile de la NASA dans leur logiciel, ils avaient manqué un indicateur de données dans le logiciel pour lui indiquer que les données étaient valides. « Donc, ceux-ci n’ont pas été traités après tout », a-t-il déclaré. « En gros, nous avons atterri avec notre IMU [unité de mesure inertielle] et nos algorithmes de flux de données de navigation optique. »
Sans données altimétriques provenant d’un télémètre laser, l’atterrisseur a fini par descendre juste avant son site d’atterrissage, dans une zone située à environ 1,5 kilomètre avec un terrain plus élevé. « Nous sommes arrivés avec plus de vitesse descendante et plus de vitesse horizontale », a déclaré Altemus, car l’atterrisseur pensait qu’il était plus haut au-dessus de la surface qu’il ne l’était en réalité.
« Nous avons frappé plus fort et avons en quelque sorte dérapé en cours de route », a-t-il déclaré. Cet impact a fini par briser au moins une jambe d’atterrissage. « Nous sommes restés assis debout, le moteur allumé pendant un certain temps, puis, alors qu’il s’arrêtait, le véhicule s’est légèrement renversé. » L’atterrissage a eu lieu sur une pente de 12 degrés, ce qui a amené l’atterrisseur à se reposer à un angle d’environ 30 degrés par rapport à la surface lorsqu’un réservoir d’hélium ou un autre composant a heurté la surface.
Si les télémètres laser avaient fonctionné, « nous aurions réussi l’atterrissage », a déclaré Crain, en se basant sur les performances d’autres systèmes.
« Cet atterrisseur a dépassé toutes mes attentes quant à ses performances », a déclaré Altemus, notant qu’aucun système majeur du vaisseau spatial n’est tombé en panne ; les jambes d’atterrissage, a-t-il dit, étaient soumises à des forces supérieures à celles pour lesquelles elles étaient prévues. « C’était un atterrisseur très robuste. »
Sue Lederer, scientifique du projet CLPS (Commercial Lunar Payload Services) de la NASA, qui a fourni à l’entreprise une commande de 118 millions de dollars pour la mission, a déclaré que les équipes de la NASA qui ont transporté des charges utiles sur IM-1 parcouraient les données toujours renvoyées, mais satisfaits de ce qu’ils avaient reçu jusqu’à présent.
« Chaque charge utile a atteint un certain niveau de ses objectifs », a-t-elle déclaré. Cela inclut les charges utiles de démonstration technologique comme le lidar qui sont désormais « passées » aux charges utiles opérationnelles. « Nous sommes très enthousiastes à l’idée de commencer à examiner les données. »
Une charge utile non-NASA qui pourrait avoir échoué est EagleCam, une caméra construite par des étudiants et conçue pour être éjectée de l’atterrisseur et en prendre des photos. Des modifications apportées au logiciel de navigation ont empêché le déploiement d’EagleCam pendant la descente, comme prévu initialement, mais Altemus a déclaré qu’EagleCam avait finalement été déployé début février 28, atterrissant à environ quatre mètres de là.
« Que ce soit dans la caméra ou dans le signal Wi-Fi envoyé à l’atterrisseur, il se peut que quelque chose ne fonctionne pas correctement », a-t-il déclaré. L’équipe du projet de l’Université aéronautique Embry-Riddle travaillait sur le problème, même si, avant le lancement, l’équipe du projet avait déclaré qu’EagleCam avait une autonomie de batterie d’environ 30 minutes seulement, ce qui limitait toute capacité à corriger les problèmes.
Lors du briefing, Intuitive Machines a déclaré que l’atterrisseur en était à ses dernières heures de fonctionnement alors que le soleil se déplaçait hors de vue du seul panneau solaire éclairé. Altemus a déclaré qu’il estime la durée totale d’opération en surface à 144 heures, soit six jours.
Cependant, la société n’a pas exclu de redonner vie à Ulysse, alias « Odie », après deux semaines de nuit lunaire. Les dirigeants ont déclaré qu’ils tenteraient de contacter l’atterrisseur dans deux à trois semaines au cas où les batteries et l’électronique du vaisseau spatial résisteraient à des conditions de survie plus froides que celles pour lesquelles elles ont été conçues. Cela n’est pas hors du domaine des possibilités : l’atterrisseur japonais SLIM a rétabli le contact le 25 février après avoir survécu à la nuit lunaire, bien qu’il n’ait pas été conçu pour cela.
« Nous sommes dans une position où, pourquoi ne pas essayer ? » » dit Altemus. « Voyons ce qui se passe. »
« C’est un petit gars décousu », a déclaré Lederer à propos de l’atterrisseur. « J’ai confiance en Odie à ce stade. »
A Dwingeloo le CAMRAS traque IM-1
Le 25 février 2024 sur la fréquence de 1210,3-1210,604 MHz le radiotélescope du CAMRAS était toujours à la poursuite du signal radio de la sonde lunaire IM-1

La sonde japonaise SLIM de nouveau active
La sonde japonaise SLIM, posée sur la Lune depuis fin janvier, est de nouveau activée après avoir survécu à deux semaines de rigoureuse nuit lunaire, a annoncé lundi l’agence spatiale japonaise Jaxa. «La nuit dernière, une commande a été envoyée à SLIM et une réponse a été reçue, confirmant que l’engin a survécu à la nuit lunaire et a gardé sa capacité de communication!», a déclaré avec enthousiasme la Jaxa sur X (anciennement Twitter).
Les communications ont été «interrompues peu de temps après, car c’était encore la mi-journée lunaire et la température des équipements de communication était très élevée», a précisé la Jaxa. «Des préparatifs sont en cours pour reprendre les opérations lorsque les températures des instruments auront suffisamment refroidi», a ajouté l’agence spatiale. Le module SLIM (Smart Lander for Investigating Moon) a réussi le 20 janvier dernier un alunissage à 55 m de sa cible initiale, soit un très haut degré de précision, faisant du Japon le cinquième pays à réussir à se poser sur le satellite naturel de la Terre après les États-Unis, l’URSS, la Chine et l’Inde.

Mais en raison d’un problème moteur dans les dernières dizaines de mètres de sa descente, SLIM s’était posé de manière inclinée et ses cellules photovoltaïques orientées vers l’ouest ne recevaient pas la lumière du soleil. SLIM a aluni dans un petit cratère de moins de 300 mètres de diamètre, appelé Shioli. Avant d’être éteint, l’engin avait pu débarquer normalement ses deux mini-rovers, censés mener des analyses de roches provenant de la structure interne de la Lune (le manteau lunaire), encore très mal connue.

Il semblerait que la sonde lunaire Intuitive Machines 1 ait aluni couchée sur le côté ?
Mais l’AMSAT-DL reçoit son signal radio sur 2210 MHz grâce à l’antenne de 20m de Bochum.

Le paragraphe suivant est extrait du site SpaceNews (et il a été traduit avec l’utilitaire Google situé sur la colonne gauche de la page)
WASHINGTON — L’atterrisseur lunaire Intuitive Machines Nova-C s’est probablement renversé lors de son atterrissage sur la lune le 22 février et repose maintenant sur le côté.
Lors d’une téléconférence télévisée le 23 février, près de 24 heures après l’atterrissage de la mission IM-1 sur la Lune , les responsables de la société ont déclaré qu’ils pensaient que l’atterrisseur, mesurant 4,3 mètres de haut et 1,6 mètre de diamètre, reposait sur le côté à quelques kilomètres de son site d’atterrissage prévu près du cratère Malapert A dans les régions polaires sud de la lune.
L’atterrisseur » a posé un pied sur la surface et a basculé », a déclaré Steve Altemus, directeur général d’Intuitive Machines, illustrant l’état de l’atterrisseur avec un petit modèle de celui-ci.
Il a suggéré que cela était dû au fait que l’atterrisseur descendait plus vite que prévu. La descente finale de l’atterrisseur était censée se dérouler directement vers le bas à environ un mètre par seconde, mais elle descendait à environ trois fois cette vitesse avec environ un mètre par seconde de mouvement latéral.
« Si vous bloquez un pied, nous avons peut-être fracturé le train d’atterrissage et basculé doucement », a-t-il déclaré. L’atterrisseur semble reposer sur un rocher, l’élevant légèrement au-dessus de la surface, en fonction de la puissance qu’il génère ; il a dit que le pied pouvait aussi être dans une crevasse.
Intuitive Machines avait signalé quelques heures après l’atterrissage que l’atterrisseur était à la verticale. Cependant, Altemus a déclaré que cette détermination était basée sur une « télémétrie obsolète » provenant des réservoirs de carburant de l’atterrisseur.

L’atterrisseur n’a pas encore renvoyé d’images alors que les contrôleurs travaillent à reconfigurer les radios du vaisseau spatial. Tim Crain, directeur de la technologie d’Intuitive Machines, a déclaré qu’ils étaient encore en train de déterminer les débits de données qu’ils pouvaient obtenir avec l’atterrisseur sur le côté et certaines antennes donc inutilisables. « Nous prévoyons de supprimer la plupart des données de mission une fois que nous aurons stabilisé notre configuration », a-t-il déclaré.
Heureusement, la seule charge utile montée sur le côté de l’atterrisseur faisant désormais face à la surface est une charge utile statique : une œuvre d’art fournie par l’artiste Jeff Koons. D’autres charges utiles commerciales et de la NASA sont en service, et nombre d’entre elles ont collecté des données lors du vol vers la Lune et lors de la descente vers la surface.
L’une de ces charges utiles de la NASA a peut-être sauvé la mission. Les ingénieurs ont pu utiliser les données de l’instrument de navigation Doppler Lidar développé au centre de recherche de Langley de la NASA pour remplacer les télémètres laser de l’atterrisseur qui ne fonctionnaient pas.
Les contrôleurs ont découvert le problème avec les télémètres laser de l’atterrisseur après s’être mis en orbite autour de la lune le 21 février et avoir décidé de les utiliser pour mesurer plus précisément l’orbite de l’atterrisseur, qui était plus elliptique que prévu. Les lasers, cependant, n’ont pas fonctionné et les ingénieurs ont déterminé qu’un interrupteur physique – une mesure de sécurité au sol car les lasers ne protègent pas les yeux – n’avait pas été actionné avant le lancement.
« C’était comme un coup de poing dans le ventre. Nous allions perdre la mission », se souvient Altemus. Crain a ensuite découvert qu’il serait possible de récupérer les données de deux lasers de l’instrument de la NASA et de les intégrer dans le système de navigation de l’atterrisseur.
« Dans le cadre d’un développement logiciel normal pour un vaisseau spatial, c’est le genre de chose qui aurait pris un mois », a déclaré Crain. « Notre équipe a fait cela en une heure et demie. »
Ce processus a également permis une plus grande validation de la charge utile de la NASA que prévu initialement. « La technologie a fonctionné parfaitement », a déclaré Prasun Desai, administrateur associé adjoint de la NASA pour la technologie spatiale. « Il a acquis des données de portée et de vitesse bien au-dessus de l’altitude requise de cinq kilomètres pendant sa descente. »
Il a noté que l’objectif du vol de la charge utile était d’atteindre un niveau de maturité technologique (TRL) de 6 sur une échelle de 1 à 9, validant ainsi un prototype de la technologie dans un environnement pertinent. Grâce à son utilisation à l’atterrissage, « nous avons pu disposer désormais d’un système opérationnel, le TRL 9. Il est désormais prêt à être utilisé ».
Altemus a ajouté qu’il était « fortuit » que Nova-C se trouve sur une orbite elliptique, ce qui a incité les ingénieurs à activer le télémètre laser plus tôt que prévu et ont ainsi découvert le problème. « C’était une chance et un peu de chance pour nous. »
En fonctionnement normal, a déclaré Crain, les télémètres laser n’auraient été activés qu’après que l’atterrisseur ait commencé sa descente motorisée vers la surface. « Il nous aurait probablement fallu cinq minutes pour atterrir avant de réaliser que ces lasers ne fonctionnaient pas », a-t-il déclaré.
Une charge utile encore opérationnelle est EagleCam, une caméra construite par des étudiants et conçue pour s’éjecter de l’atterrisseur à environ 30 mètres de la surface et prendre des images de l’atterrissage. Cependant, l’éjection n’a pas eu lieu après que le logiciel de l’atterrisseur ait été révisé pour utiliser les données de navigation Doppler Lidar. Altemus a déclaré qu’EagleCam est monté sur un panneau latéral et devrait pouvoir s’éjecter plus tard au cours de la mission, qui peut durer 9 à 10 jours à la surface, fournissant des images de l’atterrisseur.
Crain a déclaré que l’atterrisseur se trouverait probablement à moins de deux à trois kilomètres du site d’atterrissage prévu, sur la base des performances des capteurs de navigation optiques de l’atterrisseur. Le Lunar Reconnaissance Orbiter de la NASA devrait survoler la zone d’atterrissage dans les prochains jours et prendra des images dans le but de localiser le lieu d’atterrissage.
Bien que l’atterrisseur soit sur le côté, l’entreprise et la NASA ont mis en avant les étapes de la mission. Cela comprenait le fait d’être le premier vaisseau spatial commercial à atterrir en douceur sur la Lune, le premier vaisseau spatial américain à le faire depuis Apollo 17 en décembre 1972 et la mission visant à atterrir le plus près du pôle sud lunaire, à une latitude d’environ 80 degrés sud.
L’atterrissage est une validation de l’approche de la NASA, à travers son programme Commercial Lunar Payload Services, consistant à demander aux entreprises de concevoir, construire et exploiter des missions d’atterrisseur lunaire, a soutenu Joel Kearns, administrateur associé adjoint pour l’exploration à la Direction des missions scientifiques de la NASA. « C’est une réalisation gigantesque. »
Plus de 50 ans après la fin du programme Apollo, une entreprise américaine a réussi à faire atterrir l’engin spatial IM-1, sur la Lune.




Annoncé initialement pour ce jeudi à 23h49 (heure de Paris), l’horaire prévu pour la tentative d’alunissage a été revu ce mercredi matin. Selon l’Agence spatiale américaine, le module lunaire d’Intuitive Machines devrait alunir, au plus tôt, à 23h30. L’heure exacte où Odysseus touchera la surface dépend de plusieurs facteurs, notamment le moment où l’engin spatial allumera son moteur principal pour quitter l’orbite lunaire et entamer sa descente.
Destination, un cratère lunaire de 69 kilomètres de large (en photo ci-dessous), qui est situé dans la région du massif Malapert, à environ 300 kilomètres du pôle Sud de la Lune. C’est l’un des treize sites retenus par la Nasa pour la mission avec équipage Artemis 3, prévue en 2026. La tentative d’alunissage sera retransmise en direct sur la chaîne YouTube de la Nasa ce soir à partir de 22 heures et aussi via le compte de l’entreprise aérospatiale Intuitive Machines sur le réseau social X.

L’agence spatiale a choisi de sous-traiter à des partenaires privés l’envoi de charges
Pour rappel, le taux de réussite des missions d’atterrissage robotisé, qu’il s’agisse d’une agence spatiale ou d’un acteur privé, est inférieur à 50%. Un nouvel échec n’est donc pas à exclure. Réponse ce jeudi soir.
Accueil–Sciences-Objectif Lune : comment suivre en direct la tentative d’alunissage du vaisseau spatial américain Odysseus
‘Mind-blowing’ new images reveal 19 galaxies ‘down to the smallest scales ever observed’

La mission lunaire du Japon est sauvée après le réveil de sa sonde Slim
La sonde japonaise Slim a pu reprendre du service dix jours après s’être posée sur la Lune. Un problème technique l’empêchait jusqu’alors d’opérer.

Réception d’images météorologiques du satellite Meteor M2-3
Les satellites Meteor-M sont des satellites d’imagerie météorologique russes en orbite polaire. Ils transmettent des images vers la Terre au format LRPT à 137 MHz, ce qui les rend presque aussi faciles à recevoir que les anciens satellites NOAA APT. Malheureusement, tous les satellites Meteor M précédents ont connu une fin anticipée ou partielle de leur mission à cause de défauts techniques ou de collisions de micro-météorites.
Cependant, le 27 juin 2023, le dernier satellite Meteor M2-3 a été lancé avec succès sur un Soyouz-2 et transmet des images LRPT de la Terre.
Pour recevoir des images du satellite Meteor M2-3, vous avez besoin d’une antenne satellite appropriée de 137 MHz telle qu’un v-dipôle, un tourniquet ou une QFH. Un RTL-SDR ou tout autre SDR similaire peut être utilisé comme récepteur.
De nos jours, le meilleur logiciel pour recevoir Meteor M2-3 est sans aucun doute l’excellent SatDump créé par Alan F4LAU, dont les versions Windows et Android peuvent être téléchargées depuis la page GitHub Releases. Les utilisateurs de Linux peuvent suivre le guide de compilation dans le SatDump Readme.
Pour savoir quand le satellite se trouve en vue depuis votre habitation, vous pouvez utiliser un logiciel de suivi par satellite tel que Gpredict sous Linux et Mac, ou Orbitron. Mais Satdump le fait très bien également.
Plus d’informations sur l’état opérationnel de Meteor M2-3 peuvent être trouvées sur la page Happysat.
Scott Chapman – 1st try w/ 137 MHz LRPT from the new METEOR-M N2-3 1500utc. So nice to have a higher resolution weather sat back on VHF! Images from I/Q replay in SatDum


Enzo Becamel (F4IAI) METEOR M2-3 depuis Nimes lors de son passage sur l’Europe à 08:05 UTC. Le satellite est bien actif en HRPT moins de 24h après son lancement !

***************************************************
Astro Photographie
Matthieu C. a écrit :
Bonjour à chacun,
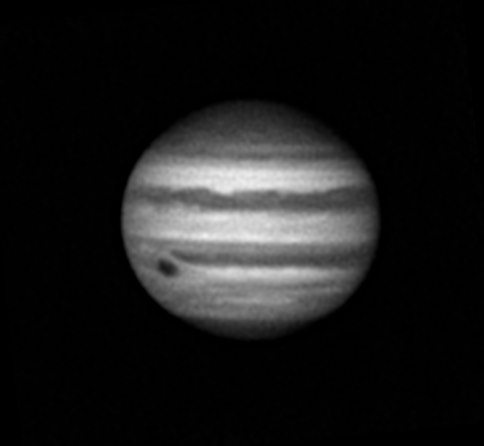
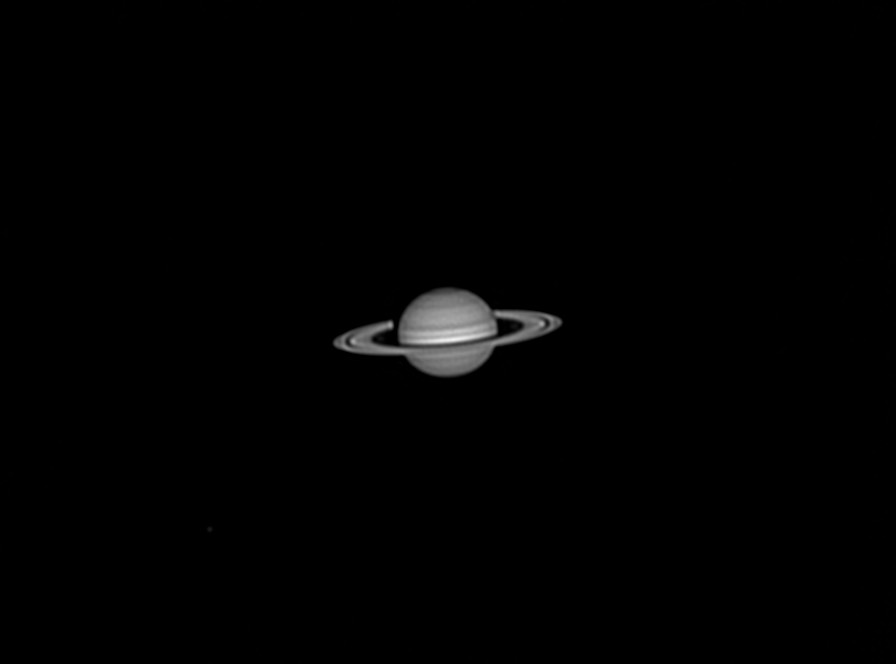
L’automne s’installe et, avec lui, le mauvais temps tant attendu par les nappes phréatiques. Une période de repos pour les astronomes amateurs après un été très favorable aux observations. C’est donc le moment pour moi de compiler et de vous partager le fruit de mon travail accompli depuis plusieurs mois. Beaucoup de tests et de nouveaux objectifs réalisés grâce à la motivation, l’aide de pointures nationales en imagerie planétaire, la persévérance et la coopération du ciel.
Je me permets donc de vous présenter un condensé des meilleurs résultats obtenus jusqu’à présent dans divers longueurs d’onde. Notez que l’ouverture instrumentale est très modeste : 150 mm seulement. L’optique a donc été exploitée au maximum de ses performances.
On commence avec de l’ultraviolet. C’est une longueur d’onde extrêmement difficile à exploiter. Le signal reçu lors des acquisitions est très faible, notamment à cause de la grande absorption atmosphérique, ce qui limite drastiquement la résolution finale. C’est pourquoi beaucoup d’amateurs ne se limitent qu’à Vénus, une cible très lumineuse. C’est donc un petit exploit pour moi d’avoir pu sortir une image UV intéressante sur Saturne. Rare sont ceux ayant eu la possibilité de faire ce type d’image et je suis donc assez fier d’entrer dans ce cercle très fermé. Pour comparer les informations obtenues à travers les longueurs d’onde, j’ai imagé parallèlement et simultanément en visible et en infrarouge. C’est la même chose pour Jupiter à ceci près que l’image infrarouge se trouve être plus précisément une image dans la bande du méthane, une bande d’absorption étroite qui sert à mettre en évidence l’altitude des couches nuageuses des géantes gazeuses.




Matthieu nous a gratifié en outre d’une magnifique animation de la tâche solaire, mais le fichier est trop gros pour ce site. En compensation M.C. nous dirige vers ce site très richement pourvu.
***********************************

***********************************

***********************************
Eclipse annulaire de Soleil observée le 14 octobre 2023 au Texas

***********************************

Image Credit & Copyright: Jerry Zhang (left), Baolong Chen (photographer) & Amber Zhang (right)
***********************************
Nous déplorons la disparition d’Hubert Reeves le 13 octobre, Astrophysicien, écrivain scientifique, vulgarisateur scientifique. Directeur de recherche, CNRS (1965-1999)

***********************************
Astéroïde Bennu : ce que révèlent les premières analyses de la matière récoltée


***********************************

***********************************
Artemis 2 : Airbus en route pour l’aventure sur la Lune
https://www.tf1info.fr/sciences-et-innovation/video-espace-artemis-ii-airbus-en-route-pour-l-aventure-sur-la-lune-nasa-2270027.html
VIDÉO – Artemis 2 : Airbus en route pour l’aventure sur la Lune
Succès du 1er essai à feu complet de l’étage principal d’Ariane 6 au CSG !
***********************************
Chandrayaan 3 : un succès total pour la première mission indienne sur la Lune !
Clap de fin pour le rover indien sur la Lune
In-situ scientific experiments continue ….. Laser-Induced Breakdown Spectroscope (LIBS) instrument onboard the Rover unambiguously confirms the presence of Sulphur (S) in the lunar surface near the south pole, through first-ever in-situ measurements. Al, Ca, Fe, Cr, Ti, Mn, Si, and O are also detected, as expected. Search for Hydrogen (H) is underway. LIBS instrument is developed at the Laboratory for Electro-Optics Systems (LEOS)/ISRO, Bengaluru. https://isro.gov.in/LEOS.html https://isro.gov.in/LIBSResults.html

Another instrument onboard the Rover confirms the presence of Sulphur (S) in the region, through another technique. The Alpha Particle X-ray Spectroscope (APXS) has detected S, as well as other minor elements. This finding by Ch-3 compels scientists to develop fresh explanations for the source of Sulphur (S) in the area: intrinsic?, volcanic?, meteoritic?,……?. https://isro.gov.in/APXS.html
The video shows an automated hinge mechanism rotating the 18 cm tall APXS, aligning the detector head to be approximately 5 cm in proximity to the lunar surface. PRL, Ahmedabad has developed APXS with support from PRL, Ahmedabad. URSC, Bengaluru has developed the deployment mechanism.
Chandrayaan-3 Mission: In-situ Scientific Experiments Radio Anatomy of Moon Bound Hypersensitive Ionosphere and Atmosphere – Langmuir Probe (RAMBHA-LP) payload onboard Chandrayaan-3 Lander has made first-ever measurements of the near-surface Lunar plasma environment over the south polar region. The initial assessment indicates that the plasma near the lunar surface is relatively sparse. https://isro.gov.in/Ch3_Rambha-LP_near-surface_Plasma.html These quantitative measurements potentially assist in mitigating the noise that Lunar plasma introduces into radio wave communication. Also, they could contribute to the enhanced designs for upcoming lunar visitors. RAMBHA-LP payload development is led by SPL/VSSC, Thiruvananthapuram.

Voici les premières observations de la charge utile ChaSTE à bord de Vikram Lander.
ChaSTE (Chandra’s Surface Thermophysical Experiment) mesure le profil de température de la couche arable lunaire autour du pôle, pour comprendre le comportement thermique de la surface de la lune. Il dispose d’une sonde de température équipée d’un mécanisme de pénétration contrôlée capable d’atteindre une profondeur de 10 cm sous la surface. La sonde est équipée de 10 capteurs de température individuels.
Le graphique présenté illustre les variations de température de la surface/près de la surface lunaire à différentes profondeurs, telles qu’enregistrées lors de la pénétration de la sonde. Il s’agit du premier profil de ce type pour le pôle sud lunaire. Des observations détaillées sont en cours.
La charge utile est développée par une équipe dirigée par le Laboratoire de physique spatiale (SPL), VSSC vssc.gov.in/spl.htmlin en collaboration avec PRL, Ahmedabad

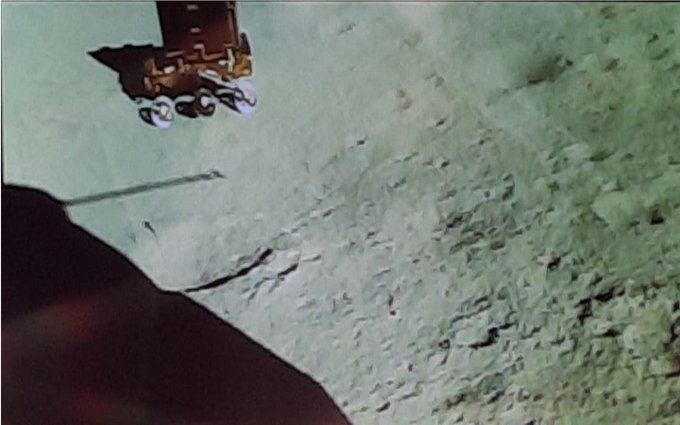
Le rover indien Pragyan (sagesse en hindi) roule sur la Lune autour de Shiv Shakti Point à la poursuite des secrets du pôle sud lunaire !

« Chandrayaan-3 Mission: All planned Rover movements have been verified. The Rover has successfully traversed a distance of about 8 meters. Rover payloads LIBS and APXS are turned ON. All payloads on the propulsion module, lander module, and rover are performing nominally. »


Voici les premières images du pôle sud de la Lune
Alunissage réussi pour la sonde lunaire indienne Chandrayaan-3 !







Chandrayaan-3 (‘charriot lunaire‘ en hindi)

La mission LVM3-M4-Chandrayaan-3
Chandrayaan-3 est une mission qui fait suite à Chandrayaan-2 et qui vise à démontrer la capacité de bout en bout d’un atterrissage et d’un déplacement en toute sécurité sur la surface lunaire. Elle se compose d’un atterrisseur et d’un rover. Elle sera lancée par le LVM3 depuis le SDSC SHAR, à Sriharikota. Le module de propulsion transportera l’atterrisseur et le rover jusqu’à une orbite lunaire de 100 km. Le module de propulsion contient la charge utile SHAPE (Spectro-polarimetry of Habitable Planet Earth), qui permettra d’étudier les mesures spectrales et polaires de la Terre depuis l’orbite lunaire.
Charges utiles de l’atterrisseur : Chandra’s Surface Thermophysical Experiment (ChaSTE) pour mesurer la conductivité thermique et la température ; Instrument for Lunar Seismic Activity (ILSA) pour mesurer la sismicité autour du site d’atterrissage ; Langmuir Probe (LP) pour estimer la densité du plasma et ses variations. Un réseau passif de rétroréflecteurs laser de la NASA est installé pour les études de télémétrie laser lunaire.
Charges utiles du rover : Spectromètre à rayons X à particules alpha (APXS) et spectroscope à décomposition induite par laser (LIBS) pour déterminer la composition élémentaire à proximité du site d’atterrissage.
Traduit avec http://www.DeepL.com/Translator (version gratuite)


Le second allumage du moteur de freinage est prévu le 20 août 2023.
17 août 2023 – Le module d’atterrissage s’est séparé avec succès du module de propulsion. « Déboostage » prévu le 18 août 2023.
https://www.cieletespace.fr/actualites/47-ans-apres-luna-24-la-russie-tente-un-retour-sur-la-lune
Watch: First look of moon as captured by Chandrayaan-3
Chandrayaan-3 placé sur orbite lunaire
Chandrayaan-3 reçue à Bochum
La réception des signaux est effectuée avec le logiciel SatDump d’Alan F4LAU que nous avions expérimenté avec succès le 17 mai 2023 sur plusieurs satellites géostationnaires.

47 ans après luna-24 la Russie tente un retour sur la lune
La sonde russe Luna-25 s’est écrasée sur la Lune, annonce Roscosmos
Luna-25, première sonde à être lancée par la Russie vers la Lune depuis 1976, s’est écrasée à la suite d’un incident…
Le réseau DSN
Le réseau Deep Space Network radioamateur rassemble des stations radioamateur qui expérimentent la réception de missions lunaires, de satellites d’observation du système solaire ou de sondes interplanétaires.
Récemment Michael SV1CAL s’est porté à l’écoute du satellite Stereo-A en bande S.
« I have been able to receive Stereo-A with my 1.4 m dish on my balcony and the X band setup I regularly use to track Earth Observation Satellites in the 7.8-8.25 GHz range. After reading the first reports by Paul M0EYT , Jean-Luc @LucMilette, Scott VE7TIL , Joe @usa-satcom and others , I thought why not give it a try at Stereo-A’s downlink frequency at ~ 8443.58 MHz.
Using a Horizons’ http request the required antenna pointing for my location was quickly found so tuned-in and saw the signal strong enough to dare to live-decode it in SatDump , Alan’s F4LAU outstanding software.
I have attached some of the first pictures I received after a few minutes of tracking. »
Some very interesting links to details:
Alan’s F4LAU SatDump : https://github.com/SatDump/SatDump
Scott’s VE7TIL article: https://skyriddles.wordpress.com/author/coastal8049/
Daniel’s EA4GPZ analysis : https://destevez.net/2022/09/decoding-the-stereo-a-space-weather-beacon/
Regards,
Michael SV1CAL
sv1cal.com


Chandrayaan-3
Flash News : Chandrayaan-3 : manœuvre de montée en orbite effectuée le 25 juillet 2023. Le prochain tir (TransLunar Injection) est prévu pour le 1er août 2023.

L’Inde a lancé une fusée en vue d’une deuxième tentative d’alunissage.
Chandrayaan-3 (« Chariot lunaire » en hindi)
 transportant le vaisseau spatial Chandrayaan-3 décollant du Centre spatial Satish Dhawan à Sriharikota, dans l'État de l'Andhra Pradesh, dans le sud du pays.")


La machine d’Anticythère
Une fois n’est pas coutume, l’actualité astronomique est portée par le dernier d’une série de films à succès, Indiana Jones, qui a pour fil conducteur la découverte d’un calculateur astronomique datant de la Grève antique.

Des répliques fonctionnelles ont pu être réalisées après étude radiographique des fragments retrouvés.

Euclid
Euclid, une mission destinée à percer les mystères de l’énergie noire et de la matière noire

Imageur de foudre
Des éclairs capturés par le premier imageur de foudre européen
Le tout premier instrument satellitaire capable de détecter en continu des éclairs en Europe et en Afrique vient d’être activé. Les nouvelles animations provenant de l’imageur de foudre apportent la confirmation que cet instrument va révolutionner le processus de détection et de prévision des tempêtes violentes.
Débris spatiaux : Astroscale dévoile sa technologie innovante et audacieuse pour nettoyer l’espace
Transit de la Station Spatiale Internationale (ISS) devant le Soleil
Bonjour à tous ! J’ai le plaisir de vous faire partager le résultat final d’un transit de l’ISS devant le Soleil. Je me suis déplacé dans le 44, ce jeudi 1er juin, pour l’occasion avec mon matériel et mon courage sous le cagnard ! Une première pour moi et la découverte de techniques de traitement laborieux qui m’ont donné quelques sueurs froides. En tout il est probable que j’y ai passé une bonne journée entière ( en travaillant souvent le soir pendant une semaine entière quand même ) pour réaliser ces chapelets et animations en visible et en ultraviolet d’un transit qui, au final, n’aura duré que… 0,78 secondes ! ( il fallait vraiment pas se rater pour l’avoir… ).
73 à tous !
Matthieu C.




Matthieu nous donne un aperçu de son expertise en astrophotographie.
La séquence d’image a été réalisée avec une caméra IMX 178 mono au foyer d’un petit newton 150/750 dont l’ouverture a été filtrée avec une feuille astrosolar OD3.8. Il y’a également l’ajout d’un filtre Baader continuum 540-10 nm au niveau du capteur. Pour le détail des exifs, j’ai imagé à gain 0 pour une expo de 2 ms. Pour les puristes, c’est un peu trop lents. Pour éviter un léger étalement des pixels causé par la vitesse dantesque de la station, il aurait fallut taper sur une cadence au moins 4 fois plus rapide ( ~0,5 ms ). De toute façon, dans mes conditions d’acquisition, le seeing pourri a un peu lissé les imperfections.
Niveau traitement, rien d’exceptionnel ! J’ai effectué l’image en 2 temps : d’abord, l’acquisition du transit en lui-même, puis la réalisation des tuiles dans les longueurs d’onde du continuum et du calcium afin de créer ma mosaïque d’arrière-plan. Le plus long a ensuite été de superposer par calques chaque image individuelle de l’iss sur ces mosaïques. D’abord pour les chapelets puis pour les animations.
73 à tous !
http://f6bvp.free.fr/video/ISS_1.MOV
Visite du LATMOS à l’UVSQ
Nous avons eu le privilège de visiter l’Observatoire de Versailles St-Quentin-en-Yvelines, piloté par Pierre Maso Directeur technique OVSQ, responsable Plateforme d’Intégration et de Tests (PIT).
Le Laboratoire Atmosphères & Observations spatiales (LATMOS) est un laboratoire de recherche français spécialisé dans l’étude des processus physiques et chimiques de l’atmosphère terrestre, l’étude des planètes et petits corps du système solaire (atmosphères, surfaces, sub-surfaces) ainsi que la physique de l’héliosphère, de l’exosphère des planètes, et des plasmas du système solaire.
L’université de Versailles – Saint-Quentin-en-Yvelines (UVSQ), membre associé de l’université Paris-Saclay, est une université française créée en 1991, située dans le département des Yvelines ainsi que dans celui des Hauts-de-Seine ; ceci depuis 2022. De plus, elle est l’une des deux universités membres associés de l’université Paris-Saclay.










La carte SPINO de communication open source VHF / UHF du satellite Inspire-sat 7 a été développée par Yannick Avelino, CEO d’Adrelys, Membre fondateur de l’association Electrolab – Radioamateur (F4HDA). Christophe Mercier de l’association AMSAT Francophone a collaboré aux logiciels du satellite et de la station sol.
Liens :
Daniel Estevez a inclu la réception du satellite dans gr-satellite pour GNU radio
INSPIRE-SAT 7 NORAD ID: 56211 Transmitters:
- 9k6 BPSK downlink (437.410 MHz): BPSK modulation with AX.25 G3RUH framing
- 2k4 2FSK SPINO payload (435.200 MHz): FSK modulation with SPINO framing
- 9k6 2FSK SPINO payload (435.200 MHz): FSK modulation with SPINO framing
Rencontres Spatiales Radioamateur AMSAT francophone 2023
A revoir sur Twitch dans l’espace d’Electrolab

Un nouveau satellite météorologique révèle une photo spectaculaire de la Terre

Des lycéens s’initient à la radioastronomie avec leur professeur de mathématiques
En opérant le radiotélescope de la Villette, rénové par l’association Dimension Parabole, les élèves d’Olivier Haroche du lycée Elie Cartan de la Tour du Pin ont observé la nébuleuse d’Orion M42 le lundi 24/4/23 :
https://elie-cartan.ent.auvergnerhonealpes.fr

L’application Pictalk de F4GKR de nouveau utilisable

Sylvain F4GKR a mis à jour son logiciel PicTalk de décodage des trames de télémesure des pico satellites. Les sources du logiciel sont téléchargeables et peuvent se compiler sous Linux Ubuntu 22.04 / Python 3.10.
https://github.com/f4gkr/PicTalk
Les essais de réception de Picsat sont en cours. On se souvient que ce cubesat tombé en panne il y a plus de quatre ans s’était réveillé spontanément le 21 juin 2022. Sa balise avait été de nouveau entendue par — Vlad Chorney ☮️ (@EU1SAT) June 21, 2022

Transit de Venus devant le Soleil en image UV
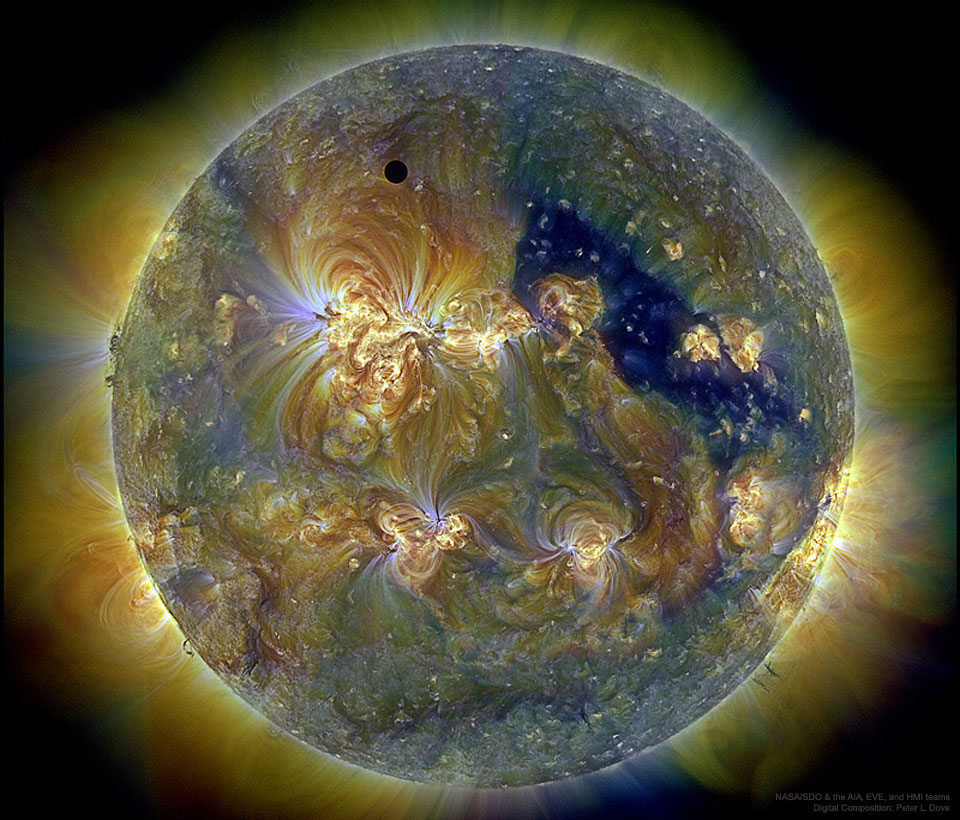
Image Credit: NASA/SDO & the AIA, EVE, and HMI teams; Digital Composition: Peter L. Dove


https://eyes.nasa.gov/dsn/dsn.html
Gleamscope : observation de la Galaxie à différentes fréquences
La Voie Lactée est vue par la tranche avec le pole nord de la Galaxie vers le haut. Utilisez la souris pour faire défiler le ciel. Besoin de plus d’informations? Regardez un tour vidéo (il s’ouvrira dans cette fenêtre). Créé par Stuart Lowe, Rob Simpson, et Chris North. Vous pouvez aussi le télécharger pour l’exécuter localement.

06-03-23
Remercions Mathieu Merci pour ces vues rapprochées de l’astre de la nuit. La Lune va redevenir d’actualité dans les prochaines années car américains et chinois vont refaire la course perdue par l’URSS il y a 50 ans. L’Europe sera peut-être aussi présente.
De son côté, Dimension Parabole devrait être en capacité d’émettre vers ce satellite naturel de la Terre, parfois appelé par les radioamateurs adeptes de l’EME, OSCAR-0 (Orbiting Satellite Carrying Amateur Radio).





14-02-23
Capturées par Mathieu voici de très belles photos des planètes Vénus, Jupiter et Mars dans les dernières lueurs du crépuscule. Vénus restant localisée dans les basses couches de notre atmosphère pour le moment, les turbulences n’aident pas pour chercher à obtenir un maximum de détails. Quant à Mars et Jupiter, leur éloignement inéluctable par rapport à la Terre accentue également la difficulté à obtenir du détail sur leur surface. Ces acquisitions ont été réalisées avec une caméra ZWO 662 couleur derrière une PowerMate x2.5 sur un télescope newtonien de 150 mm d’ouverture. J’ai également alterné de l’imagerie visible avec de l’infrarouge ( à 850 nm ), d’où les doublons, pour compenser la perte de résolution générée par le seeing.




12-02-2023
Mathieu nous a gratifié de ses dernières observations qu’il commente ainsi : » je poste mes acquisitions solaires de ce lundi 13 février. J’ai profité d’une courte accalmie dans mes activités professionnelles pour observer cette splendide activité solaire du moment. Après avoir réalisé deux mosaïques en lumière blanche, respectivement à 540 et 395 nm, j’ai ajouté ma PowerMate x2.5 pour effectuer quelques gros plans sur les groupes de tâches les plus importants. Le tout a été produit à l’aide d’une caméra ZWO 178 monochrome au foyer d’un télescope newtonien de 150 mm d’ouverture. Le seeing était correct sans être parfaitement figé mais le résultat dans le vert fut une bonne surprise avec une granulation et une structure dans les tâches plutôt bien détaillées. »



6-02-2023
La comète ZTF capturée par Bilal, nouveau membre de Dimension Parabole : « Pas de télescope, juste une dizaine de minutes, beaucoup de pollution lumineuse autour de Paris, une lune presque pleine et un objectif de 100mm. Elle tourne autour de la magnitude 6, elle est donc assez bien visible avec une paire de jumelles. Elle se trouve en ce moment dans la constellation du Cocher, près de Capella, pas loin du zénith. »

Un télescope en Inde vient de capter un signal radio venant d’une galaxie à 8,8 milliards d’années-lumière de la terre !
26 janvier 2023 à 18h00

Des astronomes situés en Inde ont capté un signal radio venant d’une galaxie située à près de 9 années-lumière de notre planète, ceci est donc le plus loin jamais enregistré.
Il s’agit d’un exceptionnel témoin de l’évolution de l’univers, qui pourrait nous permettre d’en apprendre plus sur les premières étoiles.
Une carte postale venant d’une galaxie très éloignée
SDSSJ0826 + 5630, c’est le doux nom de la galaxie d’où vient le signal radio capté par les astronomes à l’aide du radiotélescope géant Metrewave situé à Pune en Inde. Composé de 30 antennes paraboliques, le radiotélescope a capté une fréquence radio émise à une distance de 8,8 milliards d’années-lumière de la Terre. Ce signal représente une ligne d’émission correspondant à l’hydrogène neutre, c’est-à-dire le constituant fondamental de l’univers non ionisé.
L’univers étant âgé d’environ 13,7 milliards d’années selon les estimations, ce signal représente une source d’informations potentielle très importante puisqu’il était émis lorsque l’univers avait seulement 4,9 milliards d’années. Il pourrait nous offrir un nouvel éclairage sur la formation de ce dernier, comme cela est indiqué dans le rapport d’étude publié dans les Monthly Notices of the Royal Astronomical Society. Ce rapport permet également d’apprendre que le signal a pu être capté grâce à l’effet de loupe gravitationnelle, qui, grossièrement, l’a amplifié grâce à un objet situé entre nous et la galaxie observée.
Un témoin de l’univers primitif
Jusqu’à présent, le signal similaire le plus lointain jamais observé venait d’un objet cosmique situé à 4,4 milliards d’années-lumière, ce qui donne bien une idée de l’importance de la récente captation. De plus, ces signaux sont extrêmement difficiles à capter et la distance n’arrange rien. L’hydrogène neutre est donc un véritable trésor pour les observateurs de l’univers, puisque ces atomes se sont formés durant
« l’âge sombre », environ 400 000 ans après le Big Bang, lorsque les électrons et les protons se sont liés aux neutrons. Ils précédaient donc parfois la formation des premières étoiles et des premières galaxies.
En effet, lorsqu’une étoile se forme, elle émet de la lumière dans l’ultraviolet, ce qui a pour effet d’ioniser les atomes d’hydrogène, qui perdent leur neutralité. Au cours de la formation des étoiles, l’intensité des ultraviolets diminue, et certains atomes d’hydrogène ionisés redeviennent neutres. Pour faire simple, l’étude du signal pourra nous permettre de mieux comprendre la formation des étoiles et ce fameux « âge sombre ». Notons enfin que les premiers résultats ont permis de déterminer la composition en gaz de la galaxie SDSSJ0826 + 5630, qui serait extrêmement massive.
Source : FastCompany
====================================================================
La comète C/2022 E3 ZTF passe à 42 millions de kilomètres de la Terre le 1er février 2023. Elle sera alors visible à l’œil nu sous un très bon ciel, c’est-à-dire sans brume et sans gêne lumineuse. Déjà, en ce dernier tiers de janvier, l’astre errant est accessible avec une paire de jumelles.

The Sky Live

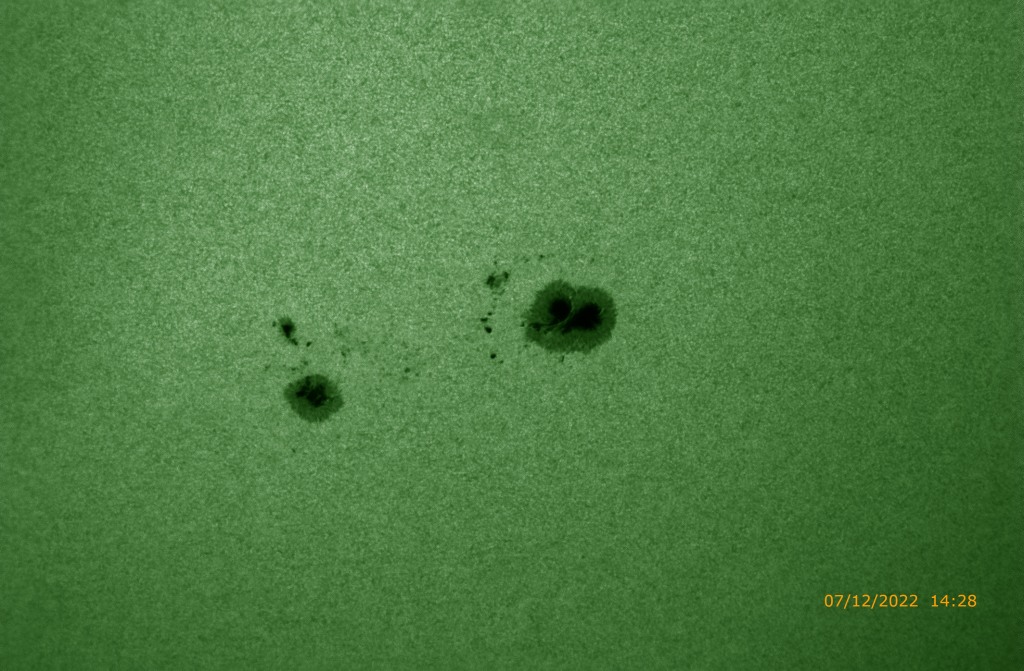
Mathieu a profité de quelques éclaircies pour observer une formidable activité solaire ce lundi 16 janvier 2023. Il s’agit de la plus forte activité observée depuis 10 ans et le plus gros noyau sombre actuellement visible se positionne comme la plus grande tâche solaire depuis le début du cycle 25. Ces mosaïques solaires ont été réalisées avec une caméra IMX 178 monochrome derrière un télescope de type newton 150/750 et deux filtres à bande étroite, respectivement à 540 et 394 nm.



Le télescope spatial Hubble observe un trou noir en train de déchiqueter une étoile

Des scientifiques viennent d’annoncer que le télescope spatial Hubble a capturé ce qu’il se passe lorsqu’un trou noir « accrète » une étoile. « En général, ces événements sont difficiles à observer. Vous obtenez peut-être quelques observations au début de la perturbation, lorsqu’elle est vraiment brillante », explique Peter Maksym, du Centre d’astrophysique de Harvard et du Smithsonian.
Photo montage de la lune par N5FXH

Matthieu nous a gratifié de deux photos de Mars prises vendredi 9/12/22 en fin de soirée dans des conditions difficiles de températures ( le pc et le télescope ayant ni plus ni moins « gelé » pendant les acquisitions ). Elles ont été faites en infrarouge ( à 642 nanomètres. On y voit un point clair qui se trouve être le volcan Olympus Mons ) et en ultraviolet ( à 360 nm. On y observe la circulation atmosphérique des nuages ).


Fabien, autre utilisateur du radiotélescope, est l’auteur de cette superbe image de la galaxie spirale M51, nommée « galaxie du Tourbillon » par Parsons en 1850.

Matthieu C
Matthieu, membre de Dimension Parabole, pratique également la photo astronomie. Voici son commentaire sur ses photos : « J’en profite pour partager mes dernières acquisitions solaires. Une activité particulièrement importante mais bénigne pour le moment. Un ciel presque miraculeux ( au vue des prévisions météo de cette semaine ) m’a permis d’effectuer une batterie de tests dans divers longueurs d’onde. De l’infrarouge ( 642 nm ) à l’ultraviolet ( dans la raie du calcium à 390 nm et pur centré sur 360 nm ) en passant par le visible, vers 540 nm. De quoi gâter nos yeux et nos paraboles ! »


Webb Inspects the Heart of the Phantom Galaxy

Nuages sur Titan le satellite de Jupiter observés par le JWT et le télescope Keck d’Hawaï.

Mission Artemis
Images from the mission are available on NASA’s Johnson Space Center Flickr account and Image and Video Library. When bandwidth allows, live views from Orion are available in real-time.

Cliquez sur l’image puis en bas à gauche et jouez avec la barre de zoom…


28 novembre 2022 – Trajectoire mission Artemis vers la Lune
L’immense fusée SLS (Space Launch System) a décollé le 16 novembre 2022, propulsant le vaisseau Orion vers la Lune. La NASA publie régulièrement les éphémérides de la fusée. François-Xavier N5FXH a réalisé cette animation qui montre les trajectoires respectives de la Lune et de la fusée SLS.

L’association JAXA des radioamateurs japonais n’a pas réussi à reprendre contact avec le satellite cubesat OMOTENASHI. Une tentative de localisation sera faite courant mars en espérant que les panneaux solaires seront alors mieux orienter vers le Soleil qui pourrait ainsi recharger les batteries.

Deux galaxies candidates remarquablement lumineuses à z ≈ 10–12 révélées par JWST
Rohan P. Naidu 26,1,2 , Pascal A. Oesch 3,4 , Pieter van Dokkum 5 , Erica J. Nelson 6 , Katherine A. Suess 7,8 , Gabriel Brammer 4 , Katherine E. Whitaker 9,10 , Garth Illingworth 11 , Rychard Bouwens 12 , Sandro Tacchella 13,14Afficher la liste complète des auteurs
Publié le 17 novembre 2022 • © 2022. Le(s) auteur(s). Publié par l’American Astronomical Society. Les lettres du journal astrophysique , volume 940 , numéro 1
Citation Rohan P. Naidu et al 2022 ApJL 940 L14
DOI 10.3847/2041-8213/ac9b22
(Pour obtenir les figures manquantes télécharger l’article original)
Les premiers 100 Myr à z > 10 marquent la dernière grande époque non cartographiée de l’histoire de l’univers, où une seule galaxie (GN-z11 à z ≈ 11) est actuellement confirmée par spectroscopie. Nous présentons ici une recherche de galaxies lumineuses z > 10 avec une photométrie JWST/NIRCam couvrant ≈1–5 μm et couvrant 49 minutes d’arc 2 des programmes publics JWST Early Release Science (CEERS et GLASS). Nos candidats les plus sûrs sont deux systèmes M UV ≈ −21 : GLASS-z12 et GLASS-z10. Ces galaxies présentent des ruptures abruptes ≳1,8 mag dans leurs distributions d’énergie spectrale (SED), compatibles avec l’absorption complète du flux vers le bleu de Ly α qui est décalé vers le rouge vers
apjlac9b22ieqn1.gif

et
apjlac9b22ieqn2.gif

Les intrus à décalage vers le rouge inférieur tels que les galaxies au repos avec de fortes cassures de Balmer seraient confortablement détectés à> 5 σ dans plusieurs bandes où, à la place, nous ne trouvons aucun flux. À partir de la modélisation SED, nous déduisons que ces galaxies ont déjà accumulé ∼10 9 masses solaires dans les étoiles sur ≲300–400 Myr après le Big Bang. La luminosité de ces sources permet des contraintes morphologiques. De manière alléchante, GLASS-z10 montre un profil lumineux exponentiel clairement étendu, potentiellement compatible avec une galaxie à disque de r 50 ≈ 0,7 kpc. Ces sources, si elles sont confirmées, rejoignent GN-z11 en défiant les prévisions de densité numérique pour les galaxies lumineuses basées sur les fonctions de luminosité UV de Schechter, qui nécessitent une zone d’étude> 10 ×plus grande que celle que nous avons étudiée ici pour trouver de telles sources lumineuses à des décalages vers le rouge aussi élevés. Ils étendent les preuves des décalages vers le rouge inférieurs pour peu ou pas d’évolution de l’extrémité brillante de la fonction de luminosité UV jusqu’à l’époque de l’aube cosmique, avec des implications sur la rapidité avec laquelle ces galaxies ont commencé à se former. Ceci, à son tour, suggère que les futures observations profondes du JWST pourraient identifier des galaxies relativement brillantes à des époques beaucoup plus anciennes que celles qui auraient pu être anticipées.
Liens connexes
Le contenu original de ce travail peut être utilisé selon les termes de la licence Creative Commons Attribution 4.0 . Toute distribution ultérieure de ce travail doit conserver l’attribution au(x) auteur(s) et le titre du travail, la citation de la revue et le DOI.
1. Introduction
2. Données
3. Sélection des échantillons et méthodes
4. Résultats
4.1. Deux z lumineux > 10 candidats galactiques
Nous confirmons les décalages photométriques vers le rouge pour les deux candidats GLASS et dérivons les propriétés de la population stellaire à l’aide du code d’ajustement Prospector SED (Leja et al. 2017 , 2019 ; Johnson et al. 2021 ). L’espace de paramètres SED exploré par Prospector est plus étendu que les combinaisons de modèles linéaires d’ EAZY , et par conséquent, il agit comme un contrôle important sur nos décalages vers le rouge dérivés. Nous utilisons FSPS (Conroy et al. 2009 , 2010 ; Conroy & Gunn 2010a ) avec les modèles stellaires MIST (Choi et al. 2017 ). Nous adoptons le modèle physique à 19 paramètres et les choix de paramètres décrits dans Tacchella et al. (2022 ) qui s’adapte au décalage vers le rouge, aux métallicités stellaires et en phase gazeuse, à la masse stellaire, à l’historique de la formation des étoiles, aux propriétés de la poussière, à l’émission des noyaux galactiques actifs (AGN) et à la mise à l’échelle de la courbe d’atténuation du milieu intergalactique (IGM). Nous apportons de légères modifications à leur configuration – en particulier, nous explorons une plage de décalage vers le rouge plus large de z = 0,1–20 et gardons deux bacs fixes à des temps de rétrospection de 0–5 et 5–10 Myr dans l’histoire de la formation d’étoiles selon Whitler et al. ( 2022 ) pour capturer les sursauts récents susceptibles d’alimenter une émission nébulaire extrême qui devrait se produire de manière générique aux décalages vers le rouge d’intérêt (par exemple, Labbe et al. 2013 ; De Barros et al. 2019 ; Endsley et al. 2020). Nous adoptons une « continuité » a priori sur l’historique de la formation des étoiles, ce qui limite la quantité de variance sur des intervalles de temps consécutifs résultant en des historiques lisses (Leja et al. 2019 ; Tacchella et al. 2022 ). Pour plus de détails, nous renvoyons les lecteurs au tableau 1 et à la section 3.4 de Tacchella et al. ( 2022 ).
Les ajustements de décalage vers le rouge de Prospector sont en excellent accord avec EAZY – nous trouvons pour GL-z10 et pour GL-z12. La photométrie et l’ inférence de décalage vers le rouge pour ces sources sont résumées dans les figures 1 et 2 , avec les flux répertoriés dans le tableau 2 . Nous confirmons qu’aucun problème significatif de qualité des données n’affecte la candidature z > 10 des sources dans l’imagerie. Nous dérivons p ( z > 10) ≈ 100 % pour GL-z12 et p ( z > 9,4) ≈ 100 % pour GL-z10, avec leurs ruptures mag dramatiques ≳1,8 expliquées par l’absorption totale des photons vers le bleu de Ly α
apjlac9b22ieqn5.gif

apjlac9b22ieqn6.gif

par l’hydrogène neutre dans le milieu intergalactique.
apjlac9b22f1_lr.jpg

Agrandir Dézoomer
Réinitialiser la taille de l’image
Figure 1. Résumé de la photométrie et de la solution de redshift pour GL-z12. En haut : 4 farcs.gif

5 × 4
farcs.gif

5 images couvrant ≈0,9–4,5 μm centrées sur le candidat z ≈ 12 mis en évidence avec des réticules blancs. La source est bien détectée (> 20 σ ) dans F200W et toutes les bandes plus rouges, et tombe brusquement dans les filtres plus bleus. En bas à gauche : la photométrie de la source est indiquée en violet, avec des limites supérieures pour les non-détections tracées au niveau 1 σ . Le modèle SED le mieux adapté d’ EAZY est représenté en orange foncé – une galaxie Lyman-break (LBG) à z= 12,2. Le SED le mieux adapté d’ EAZY contraint de se situer à z< 6 est tracé en argent, ce qui correspond à une galaxie quiescente à z ≈ 3,5 dont la cassure de Balmer produit une chute entre F200W et F150W. Cependant, une telle galaxie au repos devrait être détectée (> 5 σ ) dans des bandes plus bleues, et est en contradiction avec la rupture spectaculaire > 1,8 mag observée. En bas à droite : distributions de probabilité pour le redshift source dérivées à l’aide d’ EAZY (orange solide) et de Prospector (orange en pointillés). Nous adoptons un a priori plat sur la plage de décalage vers le rouge représentée ( z = 0–20). Les distributions dérivées sont en excellent accord et suggèrent un redshift de z ≈ 12, avec un support négligeable ( EAZY ) ou nul ( Prospector ) pour les solutions àz < 10.
Télécharger la figurine :
Image standard Image haute résolution
apjlac9b22f2_lr.jpg

Agrandir Dézoomer
Réinitialiser la taille de l’image
Figure 2. Résumé de la photométrie et de la solution de décalage vers le rouge pour GL-z10, similaire à la figure 1 . En haut : GL-z10 est bien détecté dans toutes les bandes sauf les deux plus bleues. En bas à gauche : la solution à faible z la mieux ajustée (galaxie quiescente à z ≈ 2,5) est défavorisée par l’image F115W, où une détection > 5 σ est attendue. En plus des données JWST (violet foncé), nous mesurons la photométrie HST (violet clair) pour cette source à partir des données acquises par le programme BUFFALO (Steinhardt et al. 2020 ). Les données HST sont entièrement cohérentes avec les données JWST ainsi qu’avec le SED le mieux adapté. En bas à droite : les a posteriori d’ EAZY et de Prospector s’accordent sur une galaxie z ≈ 10.
Télécharger la figurine :
Image standard Image haute résolution
Tableau 2. Photométrie en unités de nJy
| Bande | GL-z10 | GL-z12 |
| F090W | 4 ± 4 | 5 ± 4 |
| F115W | 1 ± 3 | 8 ± 5 |
| F150W | 52 ± 3 | 13 ± 3 |
| F200W | 67 ± 2 | 71 ± 2 |
| F277W | 68 ± 2 | 59 ± 2 |
| F356W | 71 ± 2 | 51 ± 2 |
| F444W | 98 ± 2 | 57 ± 2 |
Noter. Nous avons fixé un seuil d’erreur de 10 % sur nos flux mesurés pour les ajustements EAZY et Prospector afin de tenir compte de l’incertitude systématique non reflétée dans les erreurs indiquées ci-dessus.
Télécharger le tableau sous :
Les deux galaxies sont détectées à une signification très élevée dans tous les filtres en aval de leur cassure, grâce à notre sélection. Bien qu’elles apparaissent très lumineuses dans les données JWST, ces sources ont des magnitudes UV absolues ( M UV ≈ -21) qui correspondent à z ∼ 8–10 (voir, par exemple, Bouwens et al. 2021 ). Cela les rend également 1 mag plus faible que GN-z11 et même 2,5 mag plus faible que l’éventuelle galaxie candidate z ∼ 13 HD1 (Harikane et al. 2022 ). Par conséquent, ces sources ne sont pas vraiment des valeurs aberrantes extrêmes (voir également la figure 3 apjlac9b22ieqn7.gif

). Néanmoins, il est intéressant de noter que les premières images avec JWST révèlent déjà deux de ces sources lumineuses. Nous discuterons de leurs implications sur la fonction de luminosité UV (LF) dans une section ultérieure.
apjlac9b22f3_lr.jpg

Agrandir Dézoomer
Réinitialiser la taille de l’image
Figure 3. Magnitude UV absolue par rapport au décalage vers le rouge pour un échantillon représentatif de galaxies connues dans le premier milliard d’années de l’univers. Galaxies avec redshifts photométriques, provenant de Bouwens et al. ( 2022), sont représentés sous forme de points, et ceux avec des décalages vers le rouge spectroscopiques compilés à partir de la littérature sous forme de carrés. Les candidats présentés dans ce travail sont représentés par des étoiles violettes et peuplent une région jusqu’alors inoccupée de l’espace des paramètres. La luminosité de ces sources présente une opportunité unique d’étendre efficacement la frontière spectroscopique jusqu’aux premiers 100 Myr après le Big Bang.
Télécharger la figurine :
Image standard Image haute résolution
4.2. Contamination par redshift inférieur possible
The non detections of both sources in deep, shorter wavelength images essentially rule out a lower redshift solution. Nevertheless, it is interesting to explore the nature of possible contaminants. We thus rerun our photometric redshift codes and force them to find lower redshift fits. The best z < 6 solutions in our low-z EAZY runs for these sources are ≈108−9 M⊙ quiescent galaxies at z ≈ 3.4 (z ≈ 2.5) with Balmer breaks straddling the dropout filter (silver SEDs in Figures 1 and 2). However note that Balmer breaks, even in the most pathological cases (e.g., 4000 Å falls just redward of the dropout filter in a supersolar metallicity galaxy as old as the age of the universe at z ≈ 2–3.5), can only produce drops of ≲1.5 mag (assuming no attenuation). The best-fit low-z solutions have AV ≈ 0.1—stronger attenuation that deepens the break is disfavored by the blue continuum slope at wavelengths longer than the break. In other words, the best-fit low-z solutions predict >5σ detections in bands where we find no flux, and continuum slopes redder than we observe.
In order to allow for possible systematic effects in the new JWST data, we perform further testing. We refit redshifts to multiple versions of photometry for these sources—e.g., by adding PSF corrections using WebbPSF, by increasing the error floor on the photometry, and by extracting photometry using different apertures and detection bands. The only test that produces viable low-z solutions is when we set a 10 nJy error floor on all photometry—this is roughly the level in the SW filters at which the strongest Balmer breaks at z ≈ 2–3 can no longer be ruled out (see open silver squares in bottom-left panels of Figures 1 and 2). This test is a vivid demonstration of why the sensitivity of JWST/NIRCam is required to identify objects like GL-z10 and GL-z12 with confidence.
4.3. Physical Properties—A Billion Solar Mass Galaxies within ≈400 Myr of the Big Bang
While the discovery of GN-z11 has already demonstrated that the formation of a billion solar mass galaxies was well underway at ∼400 Myr after the Big Bang, the discovery of these two new sources allows us to derive further constraints on the physical properties of galaxies at this very early epoch of the universe. The Prospector results are summarized in Table 3. In order to efficiently sample the redshift range of interest, we assume a tighter redshift prior (a Gaussian centered on the EAZY p(z) with the width set to the 84th–16th percentile) than in our previous runs when fitting for the redshift.
Table 3. Summary of Properties
| GL-z10 | GL-z12 | |
| R.A. | +0:14:02.86 | +0:13:59.76 |
| Decl. | −30:22:18.7 | −30:19:29.1 |
| Redshift zProspector | ||
| Redshift zEAZY | ||
| Stellar Mass log(M⋆/M⊙) | ||
| UV Luminosity (MUV) | ||
| UV Slope (β; fλ ∝ λβ ) | ||
| Dust Attenuation (A5500 Å ) | ||
| Dust Attenuation (A1500 Å ) | ||
| Age (t50/Myr) | ||
| SFR50 Myr (M⊙ yr−1) | ||
| reff (kpc) | 0.7 | 0.5 |
| Sérsic Index n | 0.8 | 1.0 |
Note. SED fitting assumes a continuity prior on the star formation history and a Chabrier (2003) initial mass function (IMF).
Download table as:
The stellar mass for both objects is constrained to be ≈ 109 M⊙, comparable to GN-z11 (Oesch et al. 2016; Johnson et al. 2021; Tacchella et al. 2022). We have verified the stellar mass is stable to changes in the star formation history prior by also testing the « bursty » prior from Tacchella et al. (2022), which allows more rapid fluctuations in the SFH from time bin to time bin than in the fiducial model. The star formation rates averaged over the last 50 Myr (SFR50) are typical for galaxies of comparable mass at z ≈ 7–10 (e.g., Stefanon et al. 2022a). The SEDs are consistent with negligible dust attenuation and have blue UV slopes, β ≲ − 2. We note that all these derived properties from the SED fits are collectively consistent with a z > 10 interpretation for these galaxies.
4.4. Galaxy–Galaxy Lensing
Galaxy–galaxy lensing may be particularly important at the redshift frontier where flux-limited surveys may be preferentially sampling magnified sources (e.g., Wyithe et al. 2011). Here we make a simple estimate of how lensed our sources are by assuming their neighbors are singular isothermal spheres (e.g., Fort & Mellier 1994; Schneider et al. 2006; Treu 2010) following, e.g., McLure et al. (2006), Oesch et al. (2014), and Matthee et al. (2017). For this estimate, galaxy redshifts and stellar masses are based on our EAZY fits. Velocity dispersions that trace the underlying dark matter halos are inferred from the stellar mass by extrapolating the empirical scaling relation in Zahid et al. (2016), which is fit to z < 0.7 quiescent galaxies that span M⋆ ≈ 109–1012 M⊙. We choose a local relation to cover the low masses relevant to the most massive neighbors at < 10 » that are likely to produce significant magnification, while noting that the redshift evolution of such relations at least for M⋆ ≳ 1011 M⊙ is expected to be gradual—e.g., ≈ 20% higher dispersion at fixed stellar mass at z ≈ 2, (e.g., Mason et al. 2015b).
For both GL-z10 and GL-z12 we find negligible lensing (μ < 1.1) from all foreground sources within 10
farcs.gif

0. GL-z12 has two relatively massive M⋆ ≈ 109 M⊙ neighbors apparent in the bottom-left quadrant of the stamps in Figure 1. Even for these two nearby neighbors (z ≈ 2 at a separation of 0
farcs.gif

8, and z ≈ 3 at 2
farcs.gif

0) the lensing is modest. We further note that GL-z13 has a compact morphology (Section 4.5) that does not show elongation along any particular direction that would hint at strong magnification. Based on these considerations we conclude that the observed luminosities of GL-z10 and GL-z12 are likely to be their intrinsic luminosities.
4.5. The Sizes of Luminous z ≈ 10–12 Galaxies
We fit the sizes of both candidates in the F444W imaging (λrest ∼ 3500 Å) using GALFIT (Peng et al. 2010). We create 100 pixel cutouts around each galaxy, then use photutils and astropy to create a segmentation map to identify nearby galaxies. We simultaneously fit any sources with magnitudes (estimated from the segmentation map) up to 2.5 mag fainter than the target galaxy that have centers within 3 » of the galaxy; we mask fainter or more distant galaxies. In our fits, we constrain the center of the target galaxy to be within 10 pixels (0
farcs.gif

4) of the input value, the Sérsic index n to be between 0.01 and 8, the magnitude to be between 0 and 45, and the half-light radius re to be between 0.3 and 200 pixels (0
farcs.gif

012–8
farcs.gif

0). We calculate and subtract off a scalar sky background correction from each cutout, estimated from the masked, sigma-clipped cutout, then fix the sky background component in GALFIT to zero. We use a theoretical PSF model generated from WebbPSF at our 0
farcs.gif

04 pixel scale; we oversample the PSF by a factor of 9 in order to minimize artifacts as we rotate the PSF to the GLASS observation angle calculated from the Astronomer’s Proposal Tool file, then convolve with a 9 × 9 pixel square kernel, and downsample to the mosaic resolution.
We find reliable Sérsic fits for both galaxies, with half-light radii of 0.5 and 0.7 kpc, respectively, and disklike profiles (n = 1 and n = 0.8, respectively). The models are shown in Figure 4, and the size, and Sérsic profile estimates are listed in Table 3.
lazy-loading-placeholder.gif

Zoom In Zoom Out
Reset image size
Figure 4. Results of the GALFIT morphology analysis for our two sources (GL-z10 top and GL-z12 bottom). The different columns from left to right correspond to the original data (in the F444W filter), the model, and the residual. The sizes and Sérsic profiles of both sources are well constrained. GL-z10 shows some clear extension, consistent with a disk galaxy of 0.7 kpc at z ∼ 11. GL-z12 appears quite compact with an estimated size of 0.5 kpc.
Download figure:
Standard image High-resolution image
The resulting sizes of 0.5 and 0.7 kpc are typical for luminous L* galaxies at z ∼ 6–9, where measurements have been possible to date (e.g., Holwerda et al. 2015; Shibuya et al. 2015; Bowler et al. 2017; Kawamata et al. 2018; Yang et al. 2022). They are also consistent with expectations from simulations for z > 9 galaxies (e.g., Marshall et al. 2022; Roper et al. 2022). However, at z ∼ 7, the most luminous sources often break up in multiple clumps (Bowler et al. 2017). This is not the case for these two sources, at least down to the resolution limit of order 500 pc for the F444W bandpass. Interestingly, GL-z10 even shows tantalizing evidence for being an ordered disk galaxy at z ∼ 10, based on the exponential light profile and elliptical morphology. If we interpret GL-z10’s projected axis ratio of 0.65 using a sample of randomly oriented axisymmetric oblate rotators (following, e.g., Holden et al. 2012; Chang et al. 2013; van der Wel et al. 2014) and adopt c/a ≤ 0.4 as a threshold for disks, we find that the observed axis ratio implies P(disque) ∼ 0,5. Notre analyse montre la puissance inégalée de JWST pour fournir des mesures de profil précises des premières galaxies de l’univers.
5. Débat
6. Résumé et perspectives
Annexe : Comparaison avec la réduction et l’étalonnage initiaux

.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}